Control perfecto: propiedades del P, PI, PD y PID
Cuando se trata de controlar un sistema, es importante elegir el tipo de controlador adecuado para obtener el mejor rendimiento. Los cuatro controladores más comunes son el controlador proporcional (P), el controlador integral (I), el controlador derivativo (D) y el controlador proporcional-integral-derivativo (PID). En este artículo, exploraremos cada uno de estos controladores y analizaremos sus propiedades y ventajas.
Controlador proporcional (P)
El controlador proporcional es el controlador más simple y comúnmente utilizado en la industria. La salida del controlador está directamente relacionada con el error, que es la diferencia entre el valor deseado y el valor medido del proceso.
La ecuación del controlador proporcional se puede escribir como:
u(t) = Kp * e(t)
Donde u(t) es la salida del controlador, Kp es la ganancia proporcional y e(t) es el error en el tiempo t.
La ganancia proporcional determina la magnitud de la salida del controlador en respuesta al error. Un valor alto de Kp puede resultar en una rápida reducción del error, pero también puede causar oscilaciones y aumentar la inestabilidad del sistema.
Controlador integral (I)
El controlador integral se utiliza para reducir el error en un proceso constante. La salida del controlador integral se basa en la integral acumulada del error a lo largo del tiempo.
La ecuación del controlador integral se puede escribir como:
u(t) = Ki * ∫e(t) dt
Donde u(t) es la salida del controlador, Ki es la ganancia integral y ∫e(t) dt es la integral acumulada del error a lo largo del tiempo.
La ganancia integral determina la magnitud de la salida del controlador en respuesta al error acumulado. Un valor alto de Ki puede ayudar a reducir el error constante, pero también puede aumentar la sensibilidad del sistema a las perturbaciones.
Controlador derivativo (D)
El controlador derivativo se utiliza para reducir la respuesta transitoria del sistema. La salida del controlador derivativo se basa en la tasa de cambio del error a lo largo del tiempo.
La ecuación del controlador derivativo se puede escribir como:
u(t) = Kd * de(t)/dt
Donde u(t) es la salida del controlador, Kd es la ganancia derivativa y de(t)/dt es la tasa de cambio del error a lo largo del tiempo.
La ganancia derivativa determina la magnitud de la salida del controlador en respuesta a la tasa de cambio del error. Un valor alto de Kd puede ayudar a reducir la respuesta transitoria del sistema, pero también puede aumentar la sensibilidad del sistema a las perturbaciones.
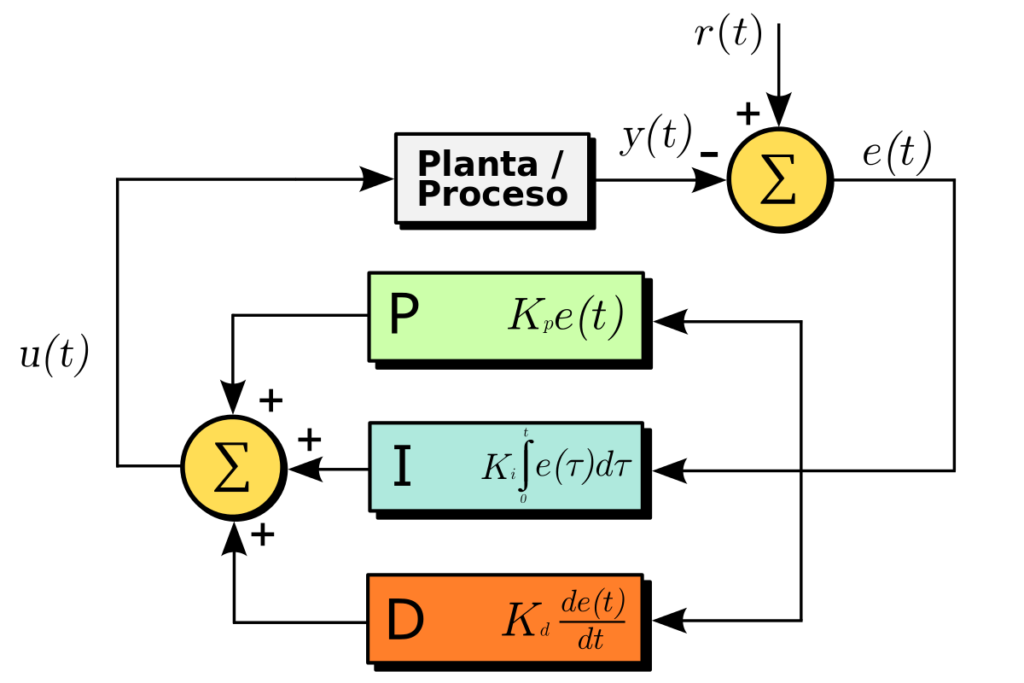
Controlador proporcional-integral-derivativo (PID)
El controlador proporcional-integral-derivativo (PID) combina los tres controladores anteriores para proporcionar una respuesta más rápida y precisa del sistema. La ecuación del controlador PID se puede escribir como:
u(t) = Kp * e(t) + Ki * ∫e(t) dt + Kd * de(t)/dt
Donde u(t) es la salida del controlador, Kp, Ki y Kd son las ganancias proporcionales, integrales y derivativas, respectivamente, e(t) es el error en el tiempo t y de(t)/dt es la tasa de cambio del error a lo largo del tiempo.
El controlador PID es el más utilizado en la industria y proporciona una respuesta rápida y precisa del sistema. Sin embargo, es importante ajustar correctamente las ganancias para evitar oscilaciones y aumentar la estabilidad del sistema.
Conclusión
La elección del controlador adecuado es esencial para lograr un control preciso y estable del sistema. El controlador proporcional es el más simple y se utiliza comúnmente en la industria, mientras que el controlador integral se utiliza para reducir el error constante, el controlador derivativo se utiliza para reducir la respuesta transitoria y el controlador PID combina los tres controladores anteriores para proporcionar una respuesta más rápida y precisa del sistema.
Preguntas frecuentes
1. ¿Qué es la ganancia proporcional?
La ganancia proporcional es un parámetro del controlador proporcional que determina la magnitud de la salida del controlador en respuesta al error.
2. ¿Por qué el controlador integral puede aumentar la sensibilidad del sistema a las perturbaciones?
El controlador integral utiliza la integral acumulada del error a lo largo del tiempo para reducir el error constante. Sin embargo, una ganancia integral alta puede aumentar la sensibilidad del sistema a las perturbaciones, lo que puede causar oscilaciones y aumentar la inestabilidad del sistema.
3. ¿Qué es la ganancia derivativa?
La ganancia derivativa es un parámetro del controlador derivativo que determina la magnitud de la salida del controlador en respuesta a la tasa de cambio del error.
4. ¿Por qué el controlador PID es el más utilizado en la industria?
El controlador PID combina los tres controladores anteriores para proporcionar una respuesta más rápida y precisa del sistema. Además, es fácil de implementar y ajustar en la mayoría de los sistemas.
5. ¿Cómo se ajustan las ganancias del controlador PID?
Las ganancias del controlador PID se ajustan mediante pruebas y errores en el sistema para encontrar la configuración óptima que proporciona una respuesta rápida y estable. También existen métodos matemáticos para el ajuste automático de las ganancias del controlador.
Deja una respuesta